为城市路口提供高精度低时延道路实时信息感知服务,提升司机驾驶安全性,保障行人安全
创通联达全息路口方案提供交通行业数字化的基础数据底座,该方案通过路侧感知设备和计算设备,结合云控平台实时提供高精度、低时延的道路交通目标信息,并通过感知的交通基础信息,服务于提升交通效率和保障交通安全等多种应用场景,如信号灯动态配时、动态车道、区域交通优化、事故处置等场景。
提供上帝视角下,路口动态交通视图
高精度感知定位能力(最高定位误差30cm以内),实现路侧数据上车重要支撑
超低时延感知输出能力(视觉感知时延<90ms),支撑低时延路侧场景
方案的整体架构包括车、路、云三端,路端基于路侧传感器和边缘计算实现交通信息的感知和融合,与车端通过RSU和车载OBU进行通信,发送和接收路侧相关信息,路侧和云端主要是云控平台,通过以太网实现交通检测数据的交互,基于路口全息数据可实现数字孪生路口、数据服务、以及其他V2X场景应用。最后可以通过融合感知评测系统提供验收、评测。
• 交通目标识别
输出属性:
• 车辆排队长度检测 • 车辆平均速度检测 • 车头空间间隔检测 • 总体车流量检测 • 车道级流量检测
• 车道时间占用率检测 • 平均车头视距检测 • 车道空间占用率检测 • 平均车间距检测
感知算法• 交通目标识别输出属性:目标类型识别:支持识别轿车、小货车、卡车、公交车四种车辆类型,摩托车(电动车)、自行车两种非机动车类型,以及行人识别▫ 交通参与者大小(长度、宽度、高度)▫ 位置(经度、纬度,WGS-84坐标系)▫ 速度▫ 航向角
融合算法• 毫米波雷达融合 • 激光雷达融合
交通流检测算法• 车辆排队长度检测 • 车辆平均速度检测• 车头空间间隔检测 • 总体车流量检测• 车道级流量检测 • 车道时间占用率检测• 平均车头视距检测 • 车道空间占用率检测• 平均车间距检测
交通事件检测算法• 行人闯入 • 异常停车 • 车辆逆行• 违规变道 • 车道拥堵 • 道路遗撒
无锡锡东新城车联网示范项目(一期)、无锡(锡山)“双智”试点核心区项目,我们承担软件总集,并设计开发了智能网联的基础数据管理平台、交通信息开放平台、城市C-V2X场景下的导航优化、V2X信息上图手机APP、V2X-Uu场景应用、车路协同数据交换平台等,与6家设备厂商、7家应用厂商进行对接,制定对接协议标准。
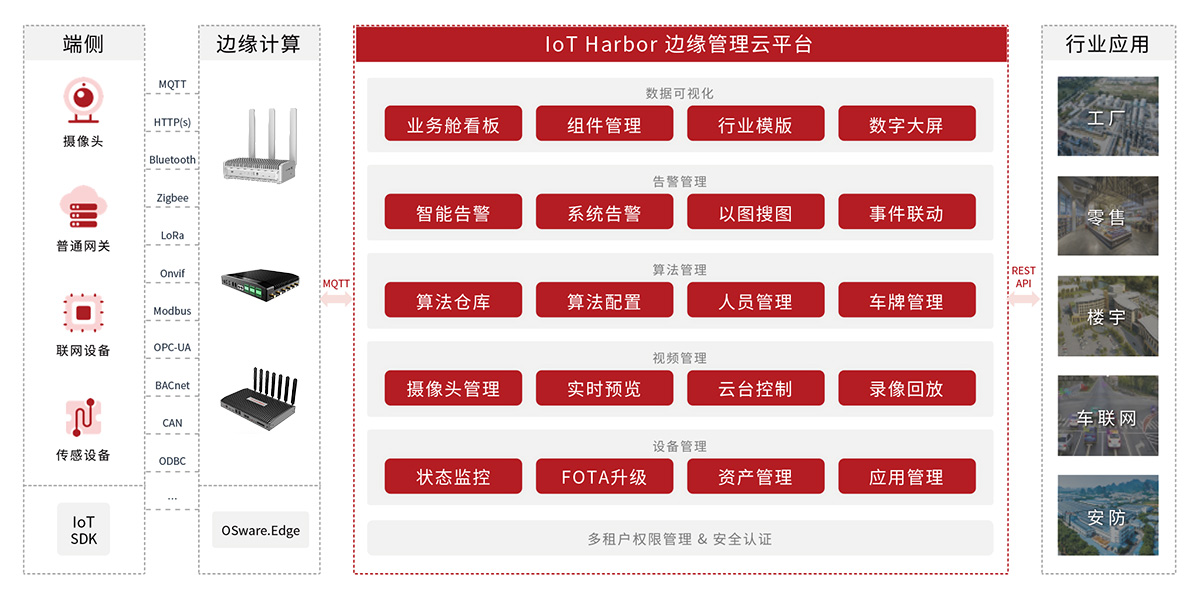
物联网设备与应用管理平台 IoT Harbor,是一个集成了设备接入和管理、应用管理、FOTA升级、规则引擎、 数据可视化、视频上云等能力的一体化云平台,提供算法应用远程部署和云边协同服务。具备跨平台、易扩 展、高安全,强稳定等特性,支持南向海量设备接入和数据采集,北向可与主流公有云平台对接。可帮助终端 设备商、系统集成商、服务提供商,实现设备快速上云,赋能行业智能化升级。